Электродвигатели
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является – электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
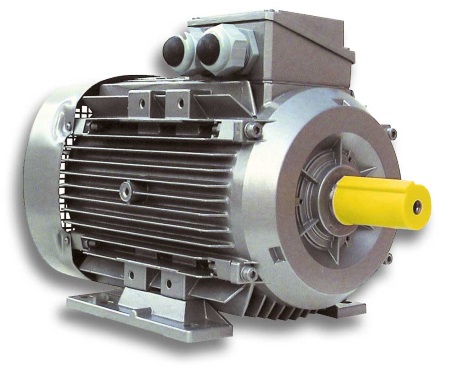
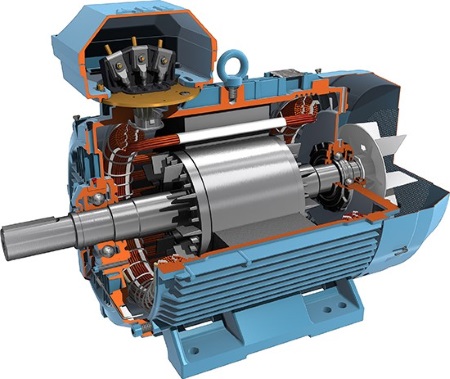
Конструкция электродвигателя
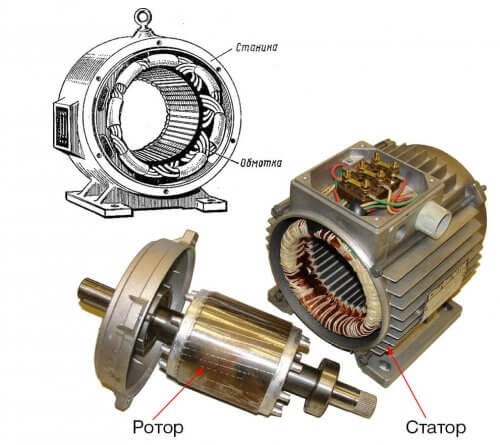
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор – неподвижная часть, ротор – вращающаяся часть.

У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя




-
Подробное описание принципа работы электродвигателей разных типов:
- Принцип работы однофазного асинхронного электродвигателя
- Принцип работы трехфазного асинхронного электродвигателя
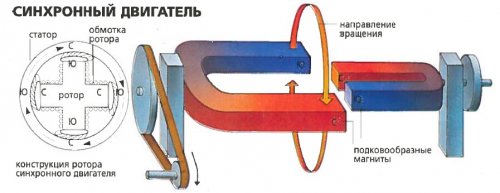
- Принцип работы синхронного электродвигателя
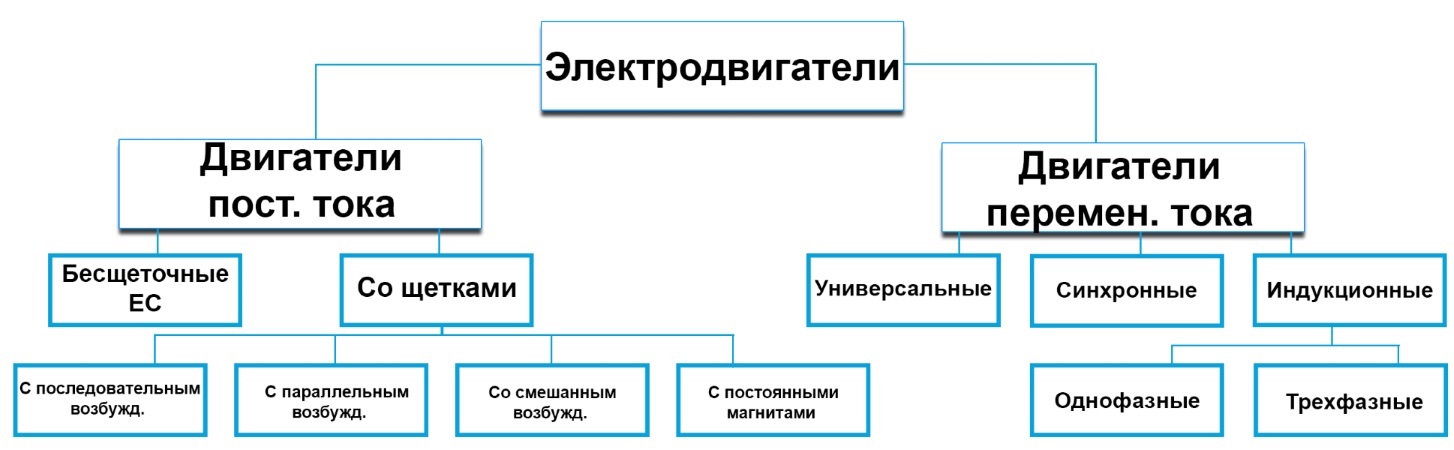
Классификация электродвигателей
| Вращающийся электродвигатель | ||||
|---|---|---|---|---|
| Само коммутируемый | Внешне коммутируемый | |||
| С механической коммутацией (коллекторный) | С электронной коммутацией 1 (вентильный 2, 3 ) | Асинхронный электродвигатель | Синхронный электродвигатель | |
| Переменного тока | Постоянного тока | Переменного тока 4 | Переменного тока | |
|
|
|
|
|
| Простая электроника | Выпрямители, транзисторы |
Более сложная электроника |
Сложная электроника (ЧП) | |
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, – датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока – электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ – коллекторный двигатель постоянного тока
- БДПТ – бесколлекторный двигатель постоянного тока
- ЭП – электрический преобразователь
- ДПР – датчик положения ротора
- ВРД – вентильный реактивный двигатель
- АДКР – асинхронный двигатель с короткозамкнутым ротором
- АДФР – асинхронный двигатель с фазным ротором
- СДОВ – синхронный двигатель с обмоткой возбуждения
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина – вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель

Коллекторный электродвигатель постоянного тока
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина – вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].

Асинхронный электродвигатель

Cинхронный электродвигатель
Специальные электродвигатели

Серводвигатель
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
 ,
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
 ,
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин -1 [4]
Начальный пусковой момент – момент электродвигателя при пуске.
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
 ,
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].
 ,
,
Для вращательного движения
 ,
,
- где
 – угол, рад,
– угол, рад,
 ,
,
- где
 – углавая скорость, рад/с,
– углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
 ,
,
- где
 – коэффициент полезного действия электродвигателя,
– коэффициент полезного действия электродвигателя, - P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (механическая), Вт
-
При этом потери в электродвигатели обусловлены:
- электрическими потерями – в виде тепла в результате нагрева проводников с током;
- магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Частота вращения

- где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
 ,
,
- где J – момент инерции, кг∙м 2 ,
- m – масса, кг
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением
 ,
,
- где
 – угловое ускорение, с -2 [2]
– угловое ускорение, с -2 [2]
 ,
,
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где
 – постоянная времени, с
– постоянная времени, с
Механическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.


| Параметр |  АДКР |
 СДПМП |
 СДПМВ |
 СРД-ПМ |
 СДОВ |
|---|---|---|---|---|---|
| Постоянство мощности во всем диапазоне скоростей | |||||
| Момент к току статора | |||||
| Эффективность (КПД) во всем рабочем диапазоне |
В соответствии с выше приведенными показателями гибридный синхронный электродвигатель, а именно синхронный реактивный электродвигатель со встроенными постоянными магнитами, является наиболее подходящим для применения в качестве тягового электродвигателя в автомобилестроении (выбор проводился для концепта автомобилей BMW i3 & BMW i8). Использование реактивного момента обеспечивает высокую мощность в верхнем диапазоне скоростей. Более того такой двигатель обеспечивает очень высокую эффективность (КПД) в широком рабочем диапазоне [7]. Области применения электродвигателейЭлектродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии [6]. Электродвигатель. Виды и применение. Работа и устройствоЭлектродвигатель представляет электромашину, перестраивающую электрическую энергию в механическую. Обычно электрическая машина реализует механическую работу благодаря потреблению приложенной к ней электроэнергии, преобразовывающейся во вращательное движение. Ещё в технике есть линейные двигатели, способные создавать сразу поступательное движение рабочего органа. Особенности конструкции и принцип действияНе важно какое конструктивное исполнение, но устройство любых электродвигателей однотипное. Ротор и статор находятся внутри цилиндрической проточки. Вращение ротора возбуждают магнитное поле, отталкивающее его полюса от статора (неподвижной обмотки). Сохранять постоянное отталкивание можно путём перекоммутации обмоток ротора, или образовав вращающееся магнитное поле непосредственно в статоре. Первый способ присущий коллекторным электродвигателям, а второй — асинхронным трехфазным. Корпус любых электродвигателей обычно чугунный или выполнен из сплава алюминия. Однотипные двигатели, не смотря на конструкцию корпуса производятся с одинаковыми установочными размерами и электрическими параметрами. Работа электродвигателя базируется на принципах электромагнитной индукции. Магнитная и электрическая энергия создают электродвижущуюся силу в замкнутом контуре, проводящем ток. Это свойство заложено в работу любой электромашины. На движущийся электроток в середине магнитного поля постоянно воздействует механическая сила, стремительно пытающаяся отклонить направление зарядов в перпендикулярной силовым магнитным линиям плоскости. Во время прохождения электротока по металлическому проводнику либо катушке, механическая сила норовит подвинуть или развернуть всю обмотку и каждый проводник тока. Назначение и применение электродвигателейЭлектрические машины имеют много функций, они способны усиливать мощность электрических сигналов, преобразовывать величины напряжения либо переменный ток в постоянный и др. Для выполнения таких разных действий существуют многообразные типы электромашин. Двигатель представлят тип электрических машин, рассчитанных для преобразования энергии. А именно, этот вид устройств превращает электроэнергию в двигательную силу или механическую работу. Он пользуется большим спросом во многих отраслях. Их широко используется в промышленности, на станках различного предназначения и в других установках. В машиностроении, к примеру, землеройных, грузоподъёмных машинах. Также они распространены в сферах народного хозяйства и бытовых приборах. Классификация электродвигателейЭлектродвигатель, является разновидностью электромашин по:
В гистерезисных устройствах вращающий момент образуется путём перемагничивания ротора или гистерезиса (насыщения). Эти двигатели мало эксплуатируются в промышленности и не считаются традиционными. Востребованными являются магнитоэлектрические двигатели. Существует много модификаций этих двигателей. Их разделяют на большие группы по типу протекающего тока:
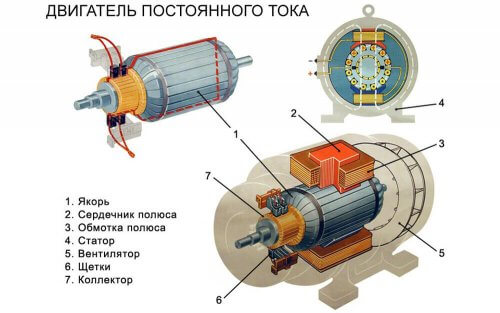
Особенности магнитоэлектрических двигателей постоянного токаС помощью двигателей постоянного тока создают регулируемые электрические приводы с высокими эксплуатационными и динамическими показателями. Типы электродвигателей:
Группа электродвигателей, питание которых выполняется постоянным током, подразделяется на подвиды:
Эти машины выпускаются различных размеров от самых маленьких низковольтных до громадных размеров (в основном до мегаватта). Миниатюрными электродвигателями оснащены компьютеры, телефоны, игрушки, аккумуляторные электроинструменты и т.п. Применение, плюсы и минусы электродвигателей постоянного токаЭлектромашины постоянного тока применяют в разных областях. Ими комплектуют подъёмно-транспортные, красочно-отделочные производственные машины, а также полимерное, бумажное производственное оборудование и т.д. Часто электрический двигатель этого типа встраивают в буровые установки, вспомогательные агрегаты экскаваторов и другие виды электротранспорта. Преимущества электрических двигателей:
Минусы двигателей:
Электродвигатель переменного токаВ электродвигателях переменного тока электроток описывается по синусоидальному гармоническому закону, периодично меняющему свой знак (направление). Статор этих устройств изготавливают из ферромагнитных пластинок, имеющих пазы для помещения в них витков обмотки с конфигурацией катушки. Электродвигатели по принципу работы бывают синхронными и асинхронными . Главным их отличием является то, что скорость магнитодвижущей силы статора в синхронных приборах равна скорости вращения ротора, а в асинхронных двигателях эти скорости не совпадают, обычно ротор вращается медленнее поля. Синхронный электродвигательИз-за одинакового (синхронного) вращения ротора с магнитным полем, аппараты именуют синхронными электродвигателями. Их подразделяют на подвиды:
Большая часть компьютерной техники оснащена шаговыми электродвигателями. Преобразование энергии в этих устройствах основано на дискретно угловом передвижении ротора. Шаговый электродвигатель имеет высокую продуктивность, независящую от их мизерных размеров. Достоинства синхронных двигателей:
Недостатки в синхронных устройствах:
Недостатки синхронного двигателя, делают более выгодным для использования электродвигатель асинхронного типа. Тем не менее, большинство синхронных двигателей из-за их работы с постоянной скоростью востребованы для установок в компрессоры, генераторы, насосы, а также крупные вентиляторы и пр. оборудование. Асинхронный электродвигательСтатор асинхронных двигателей представляет распределённую двухфазную, трехфазную, реже многофазную обмотку. Ротор выполняют в виде цилиндра, используя медь, алюминий либо металл. В его пазы залиты либо запрессованные токопроводящие жилы к оси вращения под определённым углом. Они соединяются в одно целое на торцах ротора. Противоток возбуждается в роторе от переменного магнитного поля статора. По конструктивным особенностям выделяют два вида асинхронных двигателей:
В остальном конструкция приборов не имеет отличий, статор у них абсолютно одинаковый. По числу обмоток выделяют такие электродвигатели:
Асинхронные электрические двигатели значительно облегчают работу людей, поэтому они незаменимы во многих сферах. Достоинствами этих приборов, которые сыграли роль в их популярности, являются следующие моменты:
Ко всему этому, можно добавить относительную стоимость асинхронных приборов. Но они также имеют и недостатки:
Но благодаря питанию электродвигателя с помощью частотного преобразователя, некоторые недостатки устройств устраняются. Поэтому потребность асинхронных моторов не падает. Их применяют в приводах разных станков в областях металлообработки, деревообработки и пр. В них нуждаются ткацкие, швейные, землеройные, грузоподъёмные и другие виды машин, а также вентиляторы, насосы, центрифуги, разные электроинструменты и бытовые приборы. Электрические двигателиЭлектродвигатель – устройство для преобразования электроэнергии во вращательное движение вращающейся части электрической машины. Преобразование энергии в двигателях происходит за счет взаимодействия магнитных полей обмоток статора и ротора. Эти электрические машины широко используются во всех отраслях промышленности, в качестве привода электротранспорта и инструментов, в системах автоматизации, бытовой техники и так далее. Существует множество видов электродвигателей, различающихся по принципу действия, конструкции, исполнению и другим признакам. Рассмотрим основные типы этих электрических машин. По принципу действия различают магнитоэлектрические и гистерезисные электрические машины. Несмотря на простоту конструкции, высокий пусковой момент, последние не получили широкого распространения. Эти электродвигатели имеют высокую цену, низкий коэффициент мощности, ограничивающие их применение. Подавляющее большинство выпускаемых электродвигателей – магнитоэлектрические. По типу напряжения питания различают:
По конструкции различают электродвигатели с горизонтально и вертикально расположенным валом. Корме того, электрические машины классифицируют по назначению, климатическому исполнению, степени защиты от попадания влаги и посторонних предметов, мощности и другим параметрам. Классы электродвигателей:
Таблица классификации электронных двигателей:
Электродвигатели постоянного токаДвигатели постоянного тока широко применяются в качестве привода электротранспорта, промышленного оборудования, а также микропривода исполнительных механизмов. Такие электрические машины обладают следующими преимуществами:
ДПТ различают по способу возбуждения, они бывают:
Электрические машины с электромагнитами такого типа получили самое широкое распространение. Их классифицируют по способу подключения обмотки статора:
Электродвигатели переменного токаЭлектрические машины такого типа широко используют для приводов всех типов технологического оборудования, электроинструментов, автоматических регуляторов. По наличию разности между скоростью вращения магнитного поля статора и частотой вращения ротора различают синхронные и асинхронные двигатели. Асинхронные электродвигателиБлагодаря дешевизне и простоте конструкции электрические машины такого типа получили самое широкое распространение. Их принципиальное отличие – наличие так называемого скольжения. Это разность между частотой вращения магнитного поля неподвижной части электрической машины и скоростью вращение ротора. Напряжение на вращающейся части индуцируется за счет переменного магнитного поля обмоток статора двигателя. Вращение вызывает взаимодействие поля электромагнитов неподвижной части и магнитного поля ротора, возникающего под влиянием наведенных в нем вихревых токов. По особенностям обмоток статора выделяют:
По конструкции ротора асинхронные электрические машины делят на двигатели с короткозамкнутым и фазным ротором. Обмотка ротора электрических машин первого типа представляет собой несколько неизолированных стержней, выполненных из сплавов меди или алюминия, замкнутых с двух сторон кольцами (конструкция “беличья клетка”). Асинхронные двигатели такого типа обладают следующими преимуществами:
Электрические машины с короткозамкнутым ротором имеют свои недостатки:
Электродвигатели с фазным ротором частично лишены недостатков, присущих машинам с ротором конструкции “беличья клетка”. Вращающаяся часть электрической машины такого типа имеет обмотки, соединенные в схему “звезда”. Напряжение подводится к обмотке через 3 контактных кольца, закрепленных на роторе и изолированных от него. Такие электродвигатели обладают следующими достоинствами:
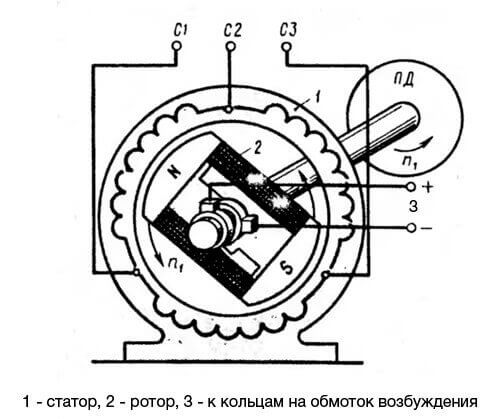
Недостатками таких двигателей являются относительно большие габариты и масса, высокая цена, более сложный ремонт и сервисное обслуживание. Синхронные двигатели переменного токаКак и в асинхронных электродвигателях, вращение ротора в синхронных машинах достигается взаимодействием полей ротора и статора. Скорость вращения ротора таких электрических машин равна частоте магнитного поля, создаваемого обмотками статора. Обмотка неподвижной части двигателя рассчитана на питание от трехфазного напряжения. К электромагнитам ротора подключается постоянное напряжение. Различают явнополюсные и неявнополюсные обмотки. В синхронных двигателях малой мощности используют постоянные магниты. Запуск и разгон синхронной машины осуществляется в асинхронном режиме. Для этого на роторе двигателя имеется обмотка конструкции “беличья клетка”. Постоянное напряжение подается на электромагниты только после разгона до номинальной частоты асинхронного режима. Синхронные двигатели имеют следующие особенности:
К недостаткам синхронных электродвигателей относятся:
Все недостатки электрических машин переменного тока можно исправить установкой устройства плавного пуска или частотного преобразователя. Обоснование выбора того или иного устройства обусловлено экономической целесообразностью и требуемыми характеристиками электропривода. Универсальные двигателиВ отдельную группу выделяют универсальные электродвигатели, которые могут работать от сети переменного тока и от источников постоянного напряжения. Они используются в электроинструментах, бытовой технике, а также других маломощных устройствах. Конструкция такой электрической машины принципиально не отличатся от двигателя постоянного тока. Главное отличие – конструкция магнитной системы и обмоток ротора. Магнитная система состоит из изолированных друг от друга секций для снижения магнитных потерь. Обмотка ротора такой машины поделена на 2 части. При питании от переменного тока напряжение подается только на ее половину. Это делается в целях снижения радиопомех, улучшения условий коммутации. К преимуществам таких машин относятся:
Однако, такие электромашины имеют свои недостатки:
Каждый тип двигателя имеет свои достоинства и недостатки. Выбор электрической машины для привода любого оборудования делается исходя из условий эксплуатации, требуемой частоты вращения, экономической целесообразности, типа нагрузки и других параметров. Электрические двигатели: определение, разновидности, применение Побочный эффект такой конвертации – выделение тепла. При-этом современные двигатели обладают очень высоким КПД, который достигает 98%, в результате чего их использование экономически более выгодно по сравнению с двигателями внутренного сгорания. Электрические двигатели используются во всех сферах народного хозяйства, начиная от бытового применения, заканчивая военной техникой. Электрические двигатели и их разновидностиКак известно с базового школьного курса физики, ток бывает переменным и постоянным. В бытовой электросети – переменный ток. Батарейки, аккумуляторы и другие мобильные источники питания предоставляют постоянный ток.
Такие изделия широко используются в подъемных машинах, буровых станках, полимерном оборудовании, в некоторых агрегатах экскаваторов. По принципу работы электродвигатели переменного тока бывают
Подробное сравнение этих видов машин можно почитать тут. Синхронные двигатели – электрические машины, где скорость вращения ротора полностью идентична частоте магнитного поля. Учитывая эту особенность, такие устройства актуальны там, где необходима стабильная высокая скорость вращения: насосы, крупные вентиляторы, генераторы, компрессоры, стиральные машины, пылесосы, практически все электроинструменты. Особое внимание среди синхронных устройств, заслуживают шаговые двигатели. Они обладают несколькими обмотками. Такой подход позволяет с высокой точностью изменять скорость вращения таких электродвигателей.
Нашли свое применение в подавляющем большинстве отраслей народного хозяйства: в приводах дымососов, транспортерах, шаровых мельницах, наждачных, сверлильных станках, в холодильном оборудовании, вентиляторах, кондиционерах, микроприводах.
Интересное видео о двигателях смотрите ниже: Преимущества и недостатки асинхронных двигателейАсинхронные электродвигатели могут обладать фазным и короткозамкнутым ротором.
Такие двигатели обладают следующими преимуществами:
Если невозможно реализовать выполнение этого условия, то используют устройства с фазным ротором. Они обладают такими достоинствами:
Кроме того, частота вращения – относительна. Она колеблется в небольших пределах. Иногда это недопустимо. Интересное видео об асинхронных электродвигателях смотрите ниже: Особенности работы синхронных двигателейВсе синхронные двигатели обладают такими преимуществами:
В любой бочке, есть ложка с дегтем. Синхронным электродвигателям присущи такие недостатки:
Сочетание всех этих особенностей делает синхронные двигатели невыгодными при мощностях до 100 Вт. А вот на более высоких уровнях производительности, синхронные машины показывают себя во всей красе. Виды электродвигателей и их особенностиЭкономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
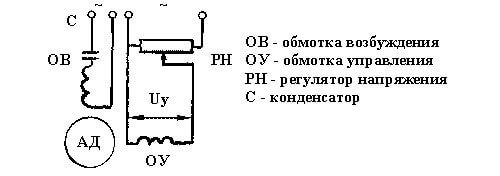
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели. Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения. При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные. Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные. Электродвигатели постоянного токаИспользуются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта. Электродвигатели переменного токаПользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы. Шаговые электродвигателиДействуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности. СерводвигателиОтносятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках. Линейные электродвигателиОбладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу. Синхронные двигателиЯвляются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью. Асинхронные двигателиТакже, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке. Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее. Какие бывают виды электрических двигателей и чем они отличаютсяКак работают двигателиПринцип работы всех видов электродвигателей состоит во взаимодействии магнитных полей ротора и статора. При этом магнитное поле может создаваться постоянным магнитном или обмоткой (катушка-электромагнит).
В зависимости от мощности и типа мотора обмотки могут быть расположены только на статоре или и на статоре и на роторе. Попытаемся объяснить устройство и принцип работы для чайников в электрике.
Начнем с того, что рассмотрим устройство коллекторных электродвигателей. Например, в маленьких коллекторных двигателях постоянного тока, как для радиомоделей, на статоре расположены постоянные магниты, а в роторе намотаны катушки из медного провода. Ток к катушкам ротора такого электродвигателя подаётся через щеточный узел, состоящий из щеток и коллектора. На коллекторе расположены ламели, к которым присоединены выводы обмоток.
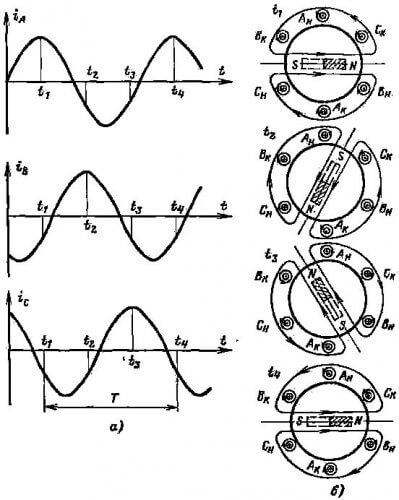
После включения питания ротор (якорь) начинает вращаться, на нём закреплен коллектор, а неподвижные щетки касаются попеременно разных пар ламелей коллектора. Через щетки и ламели к обмоткам ротора подаётся ток то на одну обмотку, то на другую, таким образом создавая изменяющееся магнитное поле, которое взаимодействует с полем магнита. В результате полюса вращающегося и неподвижного электромагнитов притягиваются, из-за чего и происходит вращение. Если опустить некоторые нюансы, то чем больше ток ротора, тем больше это поле и тем быстрее вращается ротор. Однако это применимо в основном для коллекторных машин постоянного и переменного токов (они универсальны). Если говорить об асинхронном двигателе (АД) с короткозамкнутым ротором — это электродвигатель переменного тока без щеток. В нем обмотки расположены на статоре (а), а ротор представляет собой стержни (б), замкнутые на коротко кольцами — так называемая беличья клетка. В этом случае вращающееся магнитное поле статора порождает ток в стержнях ротора, из-за которого также возникает еще одно магнитное поле. А что происходит, когда рядом расположены два магнита? Они отталкиваются или притягиваются друг к другу. Так как ротор закреплен на концах в подшипниках, то ротор начинает вращаться. АД предназначен только для переменного тока, и скорость вращения вала у него зависит от частоты тока и числа полюсов в обмотках статора, подробнее этот вопрос мы рассмотрим в статье об асинхронных электродвигателях. Но для начала вращения вала такого двигателя важно либо толкнуть его (придать начальную скорость), либо создать вращающееся магнитное поле. Оно создаётся с помощью расположенных определенным образом обмоток, подключенным к трёхфазной электросети (например, 380В), или с помощью пусковых и рабочих конденсаторов (в т.н. конденсаторных асинхронных двигателях). Кроме взаимодействия магнитных полей в во вращении вала электродвигателя участвует и сила Ампера.
Поэтому нужно понимать, что момент на валу абстрактного двигателя и число оборотов зависят от конструкции и вида электромашины, а также от силы тока и его частоты. Повторюсь, что в этой статье мы не будем углубляться подробно в особенности устройства каждого из видов и типов электродвигателей, а сделаем отдельные статьи для этого.
Стоит отметить, что асинхронные и универсальные коллекторные двигатели наиболее распространены в быту и на производстве, в приводах строительных машин. Они используются везде, как для движения промышленных механизмов, так и для автомобилей, электротранспорта и используемых в бытовой технике, вплоть до электрической зубной щетки. Основная классификацияИтак, электродвигатели главным образом делятся на машины, работающие от постоянного тока, а также от переменного тока. Чем отличается переменный ток от постоянного, мы рассказывали в статье: https://samelectrik.ru/chem-otlichaetsya-peremennyj-tok-ot-postoyannogo.html. Типы электрических двигателей рассмотрим с машин, работающих от переменки. Двигатели переменного токаБольшинство электрических машин, используемых на производстве и в повседневной жизни, для привода лифтов, в других видах электропривода работают от переменного тока. Двигатели переменного тока можно классифицировать следующим образом: При этом асинхронные двигатели различают либо по конструкции ротора:
И по количеству фаз:
Есть разные конструкции однофазных АД, в списке приведены два основных варианта! Особенностью всех асинхронных электродвигателей является то, что частота вращения ротора немного меньше скорости вращения магнитного поля статора и равняется:
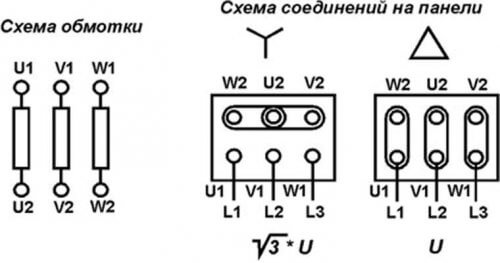
где n – число оборотов в минуту, f – частота питающей сети, p – число пар полюсов, s – скольжение, а «60» — секунд в минуте. Таким образом частота вращения ротора определяется частотой питающей сети, конструкцией обмоток, а вернее числом пар полюсов (катушек) в ней и величиной скольжения. Скольжение – это величина, которая характеризует насколько меньше частота вращения ротора относительно частоты вращающегося магнитного поля. При нормальных режимах работы лежит в пределах 0,01-0,06. Если говорить простым языком, то поле в статоре с одной парой полюсов вращается со скоростью: При двух парах — 1500 об/мин, а при трёх парах — 1000 об/мин. При скольжении, допустим, в 0,05, частота вращения ротора будет равняться: Для регулировки оборотов таких электродвигателей используют частотные преобразователи, так как на остальные переменные, приведенной выше формулы, мы повлиять не можем. Наиболее распространены в России асинхронные двигатели с напряжением питания 220В для соединения обмоток по схеме треугольника и 380В по схеме звезды.
Если в трёхфазной электрической машине вращающееся поле статора создаётся расположением обмоток и сдвигом фаз в сети на 120˚, то в однофазных такого эффекта не наблюдается. Вал будет вращаться, если задать ему первоначальное вращение, крутнув вал рукой или установив фазосдвигающий конденсатор, который создаст сдвиг фазы на пусковой обмотке.
Двухфазные конденсаторные двигатели устроены подобным образом, но вторая обмотка не отключается после пуска, а продолжает работать через конденсатор. Поэтому название «двухфазные» скорее относится к конструкции и схеме подключения, а не к цепям питания. И двухфазные, и однофазные рассчитаны на работе от сети 220В.
Синхронные электродвигатели (СД) почти всегда выполняются с обмоткой возбуждения на якоре, и ток возбуждения на неё передается либо через щеточный узел, либо наводится с помощью электромагнитной системы.
Это нужно для того, чтобы его вал вращался с частотой, совпадающей с частотой вращения поля статора. То есть такого параметра как скольжения в этом случае нет.
Ток возбуждения подаётся от специальных систем возбуждения, таких как «генератор-двигатель» или электронных преобразователей на тиристорах или транзисторах. Наиболее распространены на отечественных предприятиях такие приборы как ВТЕ, ТВУ и пр.
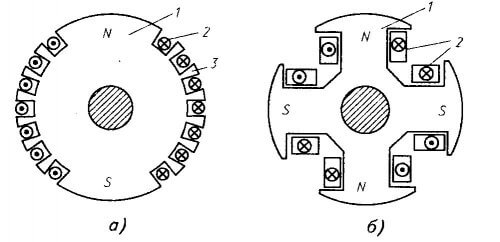
Не всегда есть обмотка возбуждения и щетки, например, в микроволновой печи в приводе вращения тарелки используется синхронный двигатель с постоянными магнитами. Синхронные машины бывают явнополюсными и неявнополюсными. Визуальные отличия заключаются в конструкции ротора, на практике есть разница и в их характеристиках, методах производства и конструкции. На практике обычному домашнему электрику вряд ли с ними придётся столкнуться.
Остаётся сказать главное о двигателях переменного тока – они плохо поддаются регулировке скорости вращения из-за того, что их обороты привязаны к скорости. Уменьшение напряжения (тока) на статоре или возбуждения (у синхронных и асинхронных с фазным ротором) приводит к падению момента и увеличению величины скольжения (у АД), при этом вал может вращаться медленнее. Чтобы регулировать обороты таких двигателей, вам нужен частотный преобразователь. О том, как выбрать частотник, мы рассказали в статье: https://samelectrik.ru/vybor-chastotnogo-preobrazovatelya.html. Двигатели постоянного тока (ДПТ)Существуют следующие виды и типы электродвигателей постоянного тока:
Коллекторные двигатели можно разделить на группы по типу возбуждения:
По типу подключения обмоток возбуждения различают следующим образом:
У маломощных коллекторных ДПТ возбуждение чаще всего организовано с помощью постоянных магнитов.
При независимом возбуждении у коллекторного электродвигателя обмотки статора и ротора не соединены друг с другом, а в сущности питаются от разных источников. Таким образом можно организовать регулировку момента или оборотов, а также добиться большей энергоэффективности. В зависимости от конструкции такой электродвигатель может работать или только от постоянного тока, или работать от переменного и постоянного. Во втором случае их называют «универсальный коллекторный двигатель». Они широко распространены в быту, используются в кухонной технике и электроинструменте (болгарки, дрели и т.д.).
Бесколлекторные двигатели лишены недостатков, присущих коллекторным, за счет отсутствия щеточного узла. Ток подаётся к трём обмоткам статора, а обмотки переключаются с помощью контроллера. Фактически бесщеточные ДПТ питаются преобразованным переменным током. Принцип работы этих двигателей вы можете узнать, посмотрев следующее видео: По устройству они похожи на синхронные двигатели, за исключением того, что используются постоянные магниты, а не электромагниты. Для вращения такого двигателя и повышения эффективности его работы используются датчики Холла для определения положения вала и правильного переключения обмоток.
Часто их называют вентильными двигателями, а в англоязычных источниках подобные двигатели, в зависимости от конструкции, называют PWSM или BLDC.
Они используются в компьютерных кулерах, в качестве привода для радиоуправляемых моделей, таких как квадрокоптеры, а также в моторколесе для велосипеда. Дополнительная классификацияКроме рассмотренных выше двигателей следует сказать о других видах, таких как:
Шаговые двигатели и сервоприводы используются там, где нужно позиционировать узел какого-то механизма. Простейший пример – ЧПУ, 3D-принтер и прочее. Также с помощью «шаговиков» иногда управляют положением дроссельной заслонки автомобиля – и это лишь малая часть их применения. Описание функций и особенностей этих видов электропривода – это тема для отдельной статьи. Если вам интересно, пишите комментарии и мы её опубликуем! Линейный двигатель, в отличии от всех выше перечисленных, движение его вала не вращательное, а поступательное. То есть он не крутится, а двигается «вперед-назад». Они бывают разными:
На практике встречаются редко, используются в качестве привода для монорельсовой железной дороги, для подачи рабочего органа в различных станках. Однако приведенная в статье классификация была выбрана с точки зрения практичности, в литературе же предлагают разделять электропривод по следующим критериям. По специфике создающегося вращательного момента: Следующий вариант классификации основан на различиях конструкции и особенности их конструктивного исполнения. По типу и расположению вала:
Защите от действий внешней среды:
По продолжительности режима работы:
По мощности также можно различать машины малой, средней, большой мощности. Однако пределы этих мощностей приводить не имеет смысла, поскольку где-то 6 МВт – это средняя мощность, а где-то 1 кВт – это колоссальное число. Подробно рассмотреть все виды в пределах одной статьи невозможно, поэтому мы рассмотрим каждый вариант исполнения по отдельности. Надеемся, предоставленная вкратце классификация помогла вам понять, какие бывают типы электродвигателей постоянного и переменного тока, а также в чем их различия и особенности применения! Похожие записи: |



 Электрический двигатель – специальная машина (ее еще называют электромеханическим преобразователем), с помощью которой электроэнергия преобразовывается в механическое движение.
Электрический двигатель – специальная машина (ее еще называют электромеханическим преобразователем), с помощью которой электроэнергия преобразовывается в механическое движение.